DIY CNC Mill
Honors project for my senior year at ASU
Description
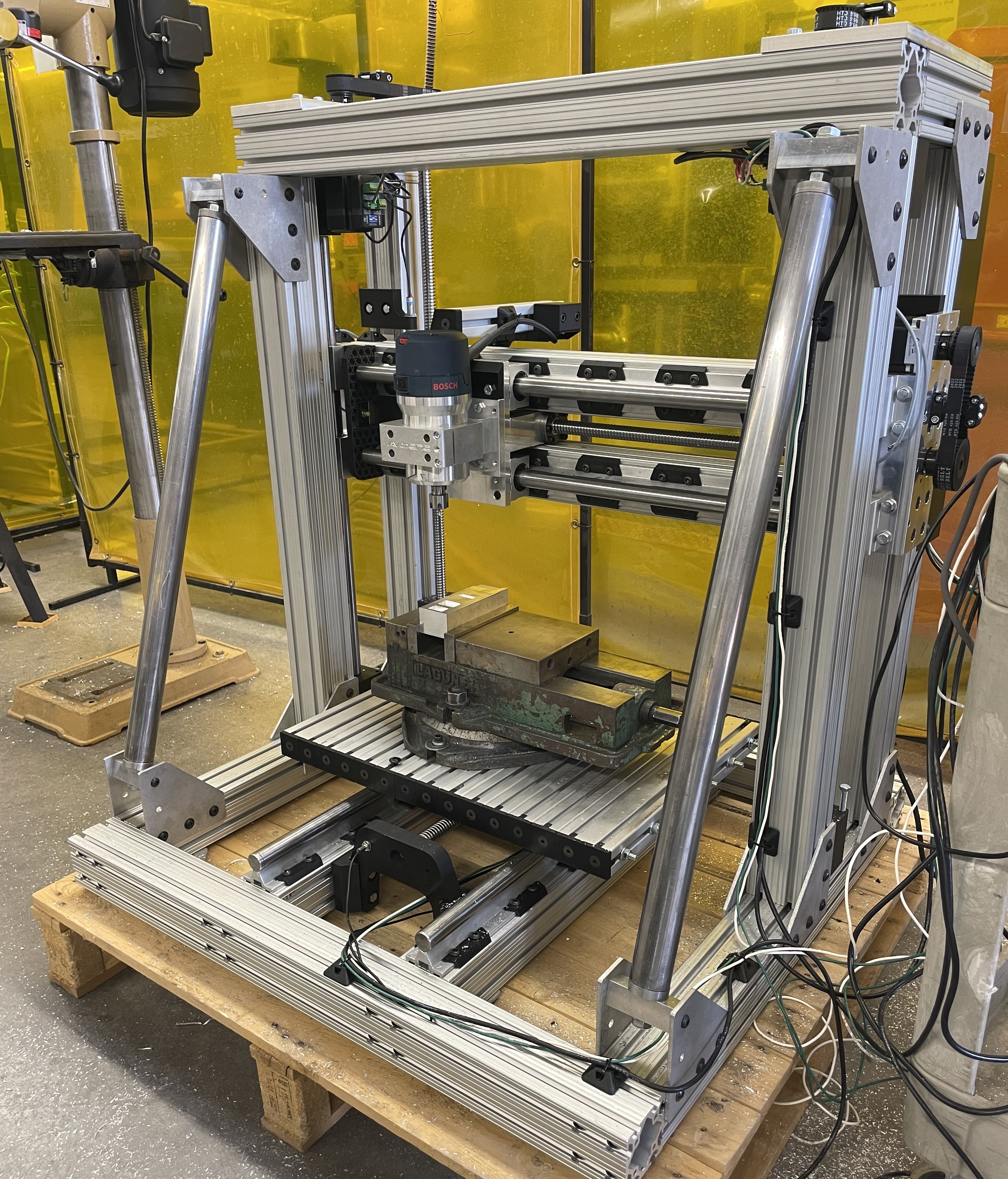
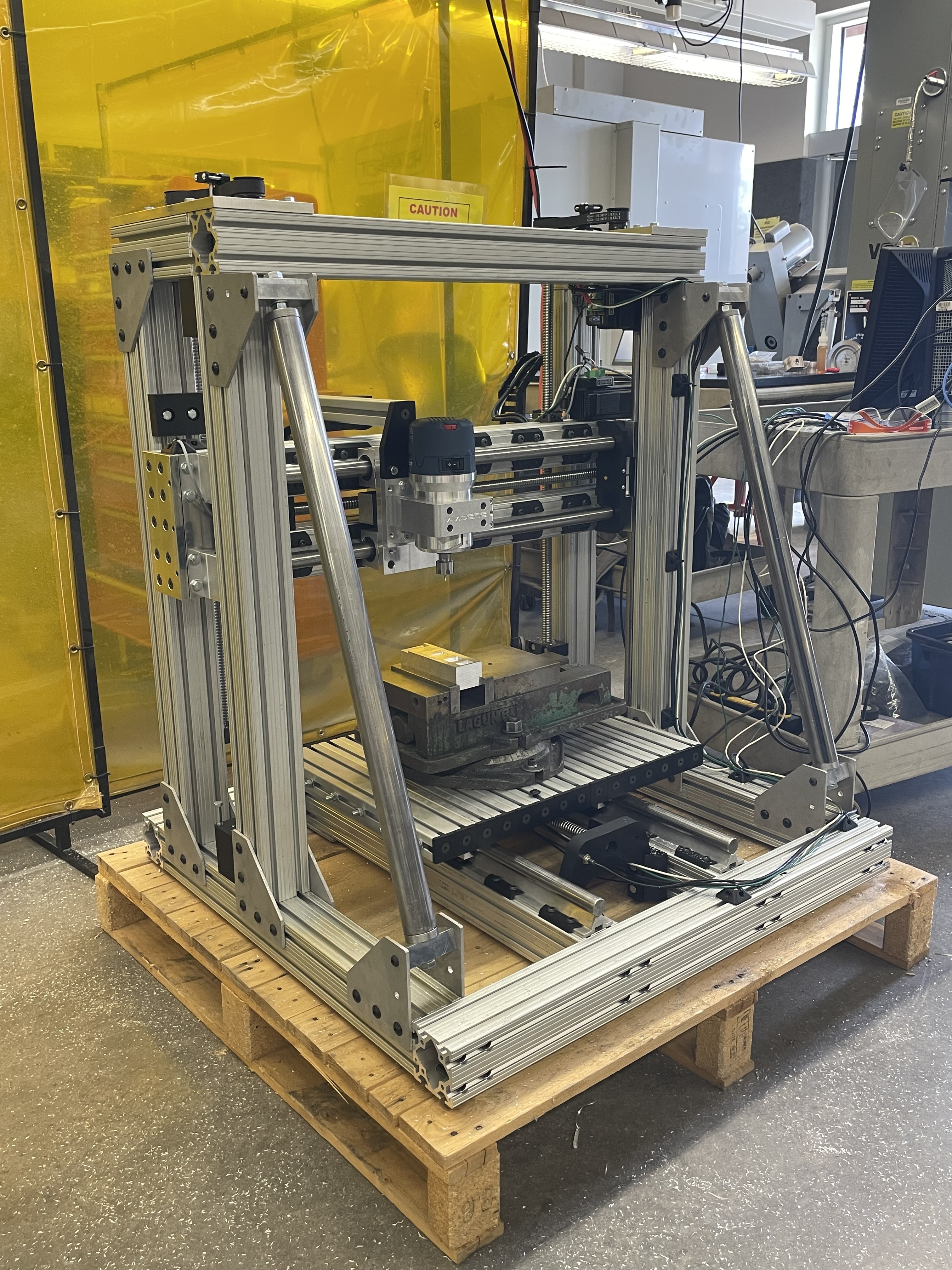
 For my honors final project at ASU, I decided build my own CNC milling machine. This is so that I would be able to manufacture metal parts for robots. Along with my printer, this would mean most small robots would be feasible for me to create. But really, I just wanted to improve my manufacturing capabilities. The machine has a working area of 570x425x445 millimeters, and has a max speed of 2800 mm/min on the X and Y axes, and a max speed of 500 mm/min on the Z axis (due to a lack of counterweight). The motor selected for the spindle is a Bosch router with a minimum speed of 6000 RPM and maximum speed of 28,000 RPM. After the project finished, I added the enclosure to reduce the mess it makes, as well as give a place to mount the control electronics. The machine was not constructed from a kit, the design was entirely my own, using the available parts and whatever we could afford with our $1000 budget.
For my honors final project at ASU, I decided build my own CNC milling machine. This is so that I would be able to manufacture metal parts for robots. Along with my printer, this would mean most small robots would be feasible for me to create. But really, I just wanted to improve my manufacturing capabilities. The machine has a working area of 570x425x445 millimeters, and has a max speed of 2800 mm/min on the X and Y axes, and a max speed of 500 mm/min on the Z axis (due to a lack of counterweight). The motor selected for the spindle is a Bosch router with a minimum speed of 6000 RPM and maximum speed of 28,000 RPM. After the project finished, I added the enclosure to reduce the mess it makes, as well as give a place to mount the control electronics. The machine was not constructed from a kit, the design was entirely my own, using the available parts and whatever we could afford with our $1000 budget.
Machine


Components
Here are some of the parts I have made, which were either made to use on the machine or were made with the machine after it was completed.
Parts Used
First, we have a set of pulleys I manufactured. The inside clamping hubs are steel, which was manufactured using a manual lathe and mill. The outside tooth profile is carbon fiber nylon printed on a Markforged. Second, we have steel bearing holders that were manufactured on a Haas CNC mill, and are used as the ball screw end blocks. 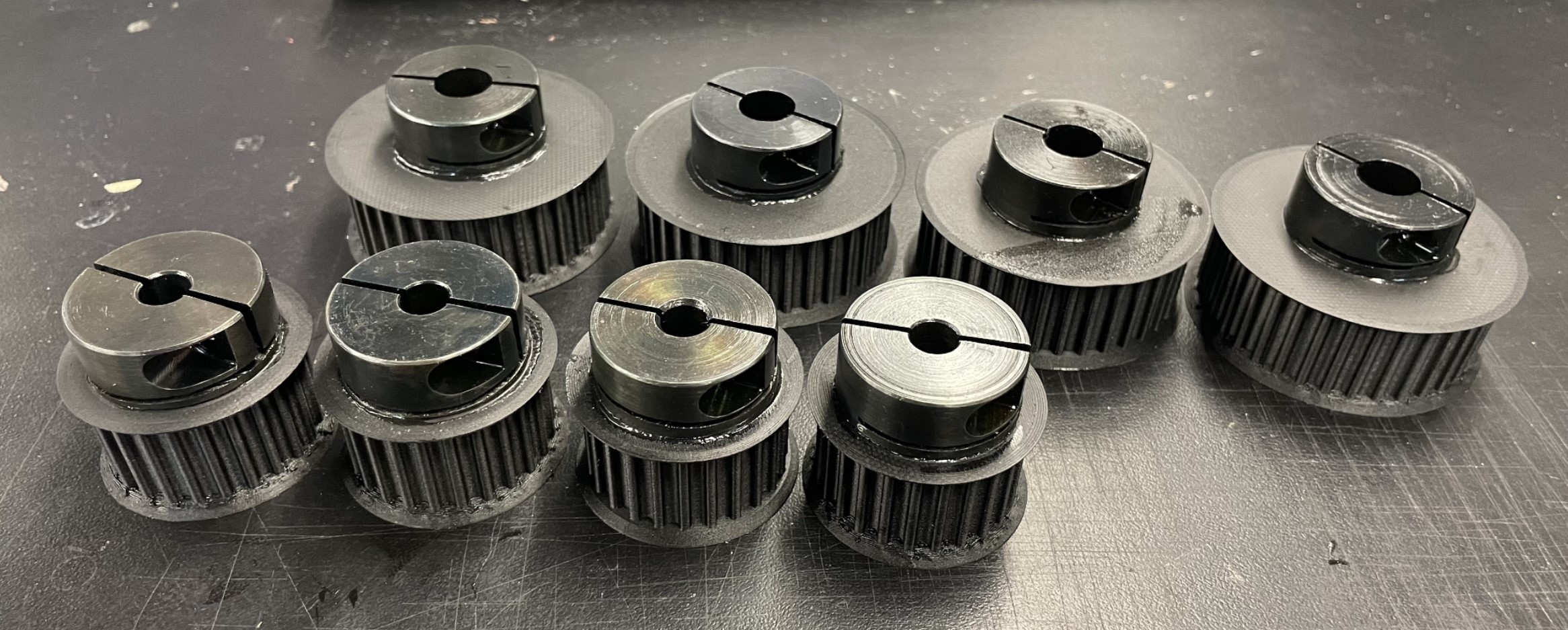

Electrical
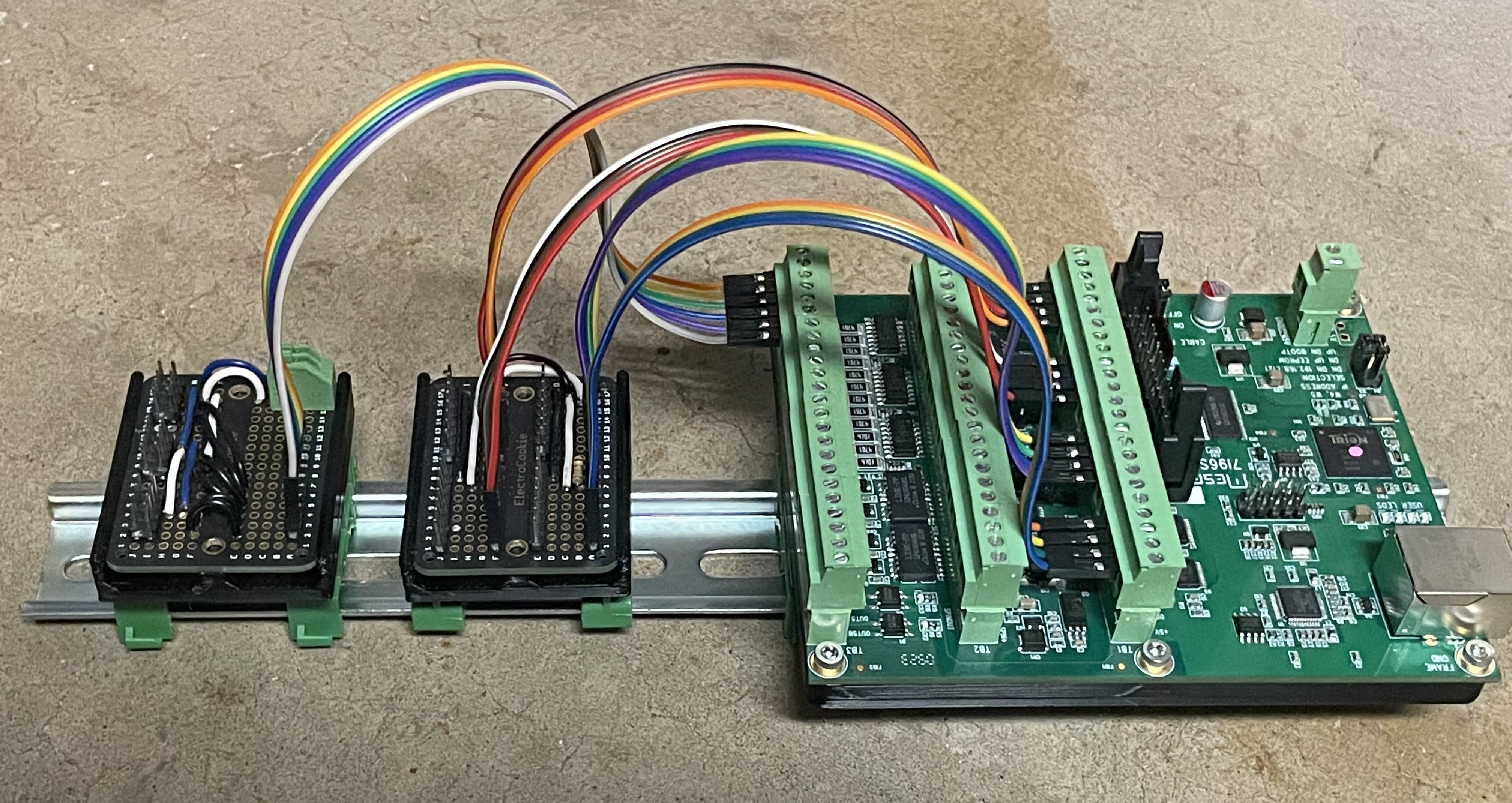 Mesa FPGA with wires leading to hand soldered breakout boards that the servos and inductive sensors plug into
Mesa FPGA with wires leading to hand soldered breakout boards that the servos and inductive sensors plug into  Electrical diagram of the machine
Electrical diagram of the machine
Parts Made
Here are some functional parts that have been made by my CNC mill. See the VEXU Over Under post to see how these parts were implemented. They are all made of aluminum, with one part having a helpful banana for scale. 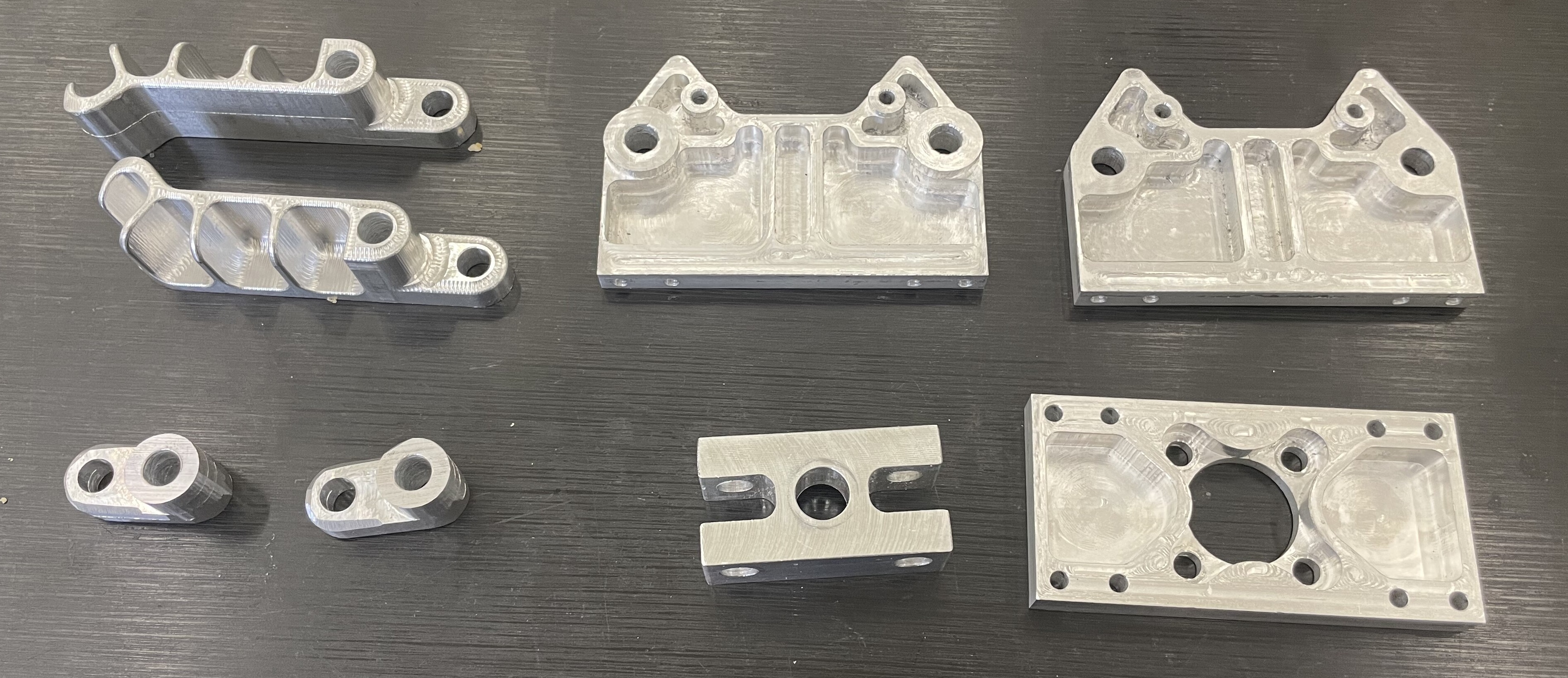 Parts for a clamping claw used for climbing in the VEXU game Over Under
Parts for a clamping claw used for climbing in the VEXU game Over Under 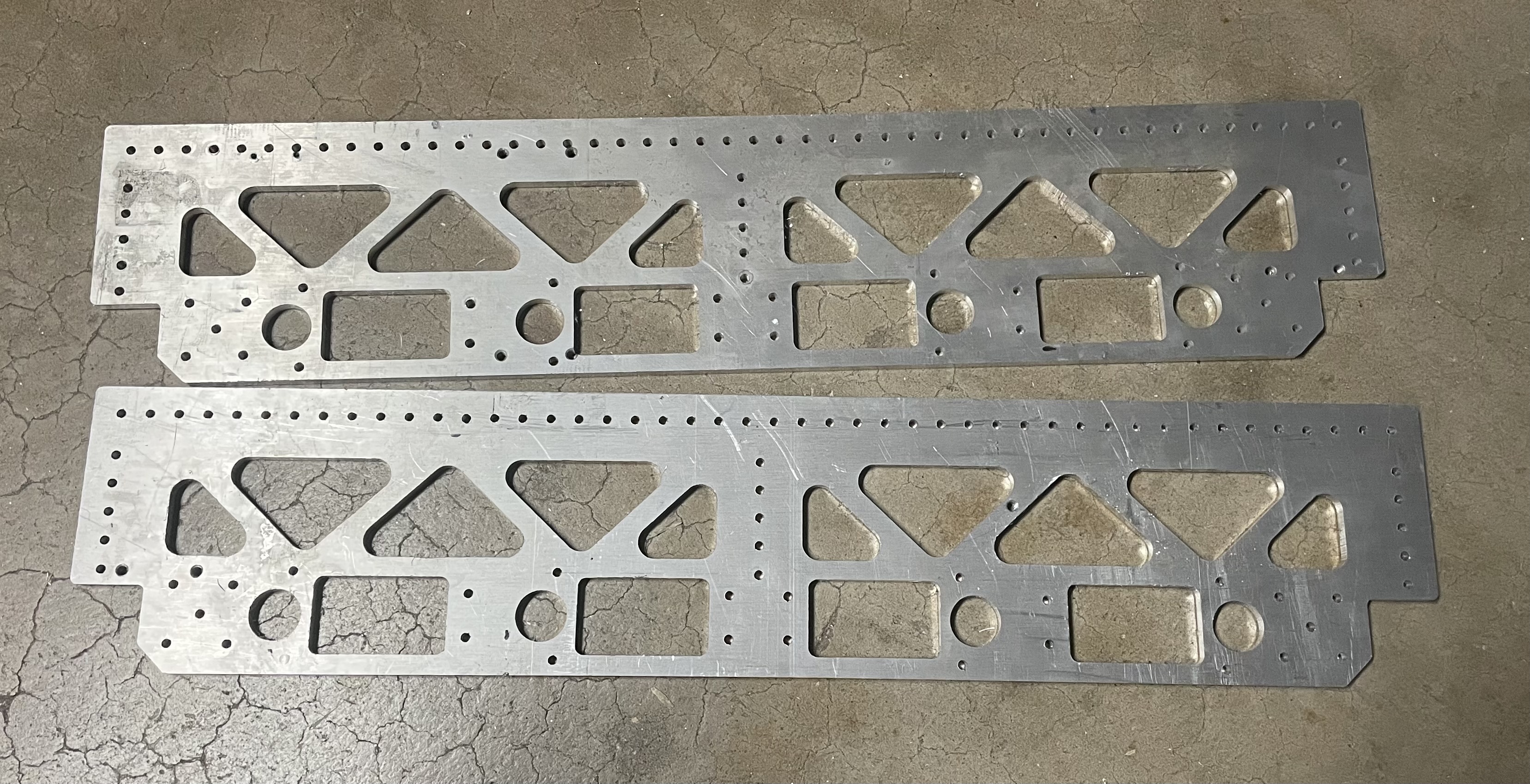 The center drivetrain plate for my Revolver VEX robot
The center drivetrain plate for my Revolver VEX robot 
 Bearing holder for the main axis of the Revolver VEX robot and the driving gear for the air tank assembly
Bearing holder for the main axis of the Revolver VEX robot and the driving gear for the air tank assembly